- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

บ้าน
>
สินค้า > มอเตอร์แปรงถ่าน DC แบบถ้วยกลวง > มอเตอร์แปรงคาร์บอน > มอเตอร์กระแสตรงแปรงถ่านขนาด 22 มม
สินค้า





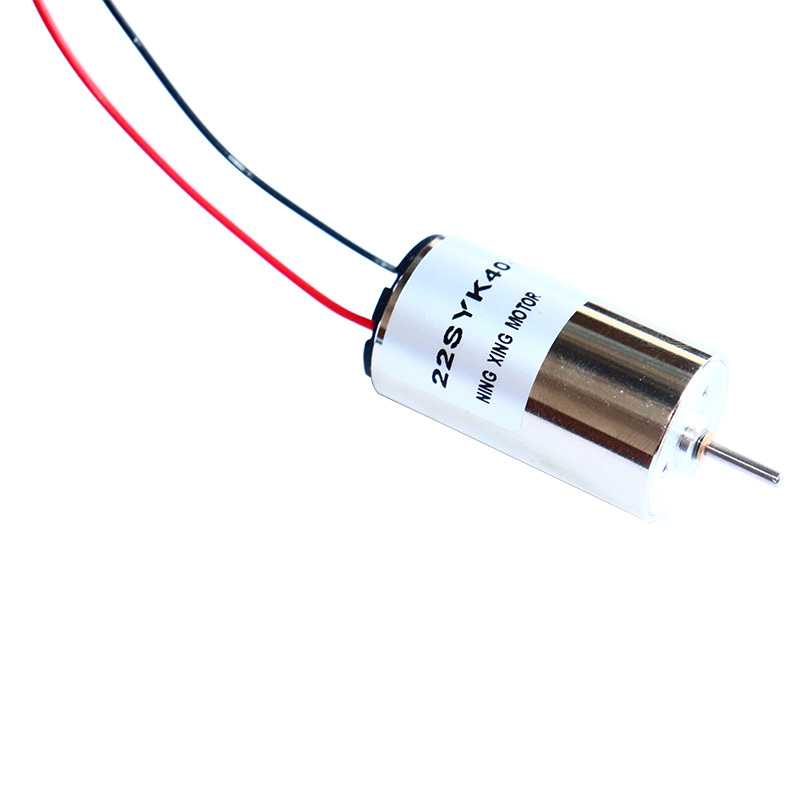
มอเตอร์กระแสตรงแปรงถ่านขนาด 22 มม
คุณยินดีที่จะมาที่โรงงานของเราเพื่อซื้อมอเตอร์ DC แปรงคาร์บอน RuiXing 22 มม. คุณภาพสูงที่ขายล่าสุดราคาถูก เรายืนกรานในการผลิตที่ได้มาตรฐาน เป็นระบบ และได้มาตรฐาน ใช้กลยุทธ์การจัดการคุณภาพอย่างเต็มรูปแบบเพื่อให้มั่นใจในคุณภาพของผลิตภัณฑ์ การตรวจสอบและติดตามคุณภาพกระบวนการเต็มรูปแบบ และทุกลิงก์เล็กๆ จะไม่ละเว้น
ส่งคำถาม
รายละเอียดสินค้า
คุณยินดีที่จะมาที่โรงงานของเราเพื่อซื้อมอเตอร์ DC แปรงคาร์บอน RuiXing 22 มม. คุณภาพสูงที่ขายล่าสุดราคาถูก กมอเตอร์กระแสตรงแปรงถ่านขนาด 22 มมเป็นมอเตอร์ไฟฟ้าขนาดกะทัดรัดที่ใช้แปรงคาร์บอนเพื่อนำกระแสไฟฟ้าไปยังกระดองหมุนซึ่งสร้างพลังงานกล ขนาดของมันถูกกำหนดโดยเส้นผ่านศูนย์กลางของตัวมอเตอร์
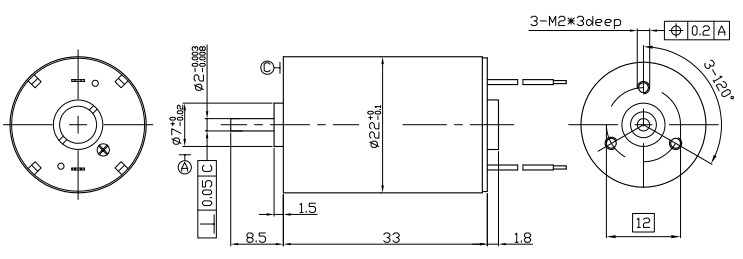
พารามิเตอร์เทคนิค 22SYK33.H.T
พารามิเตอร์มอเตอร์
| กำลังไฟที่กำหนด |
W | 4.0 | 5.0 | 4.0 |
17.0 |
15.0 |
| แรงดันไฟฟ้าที่ได้รับการจัดอันดับ |
โวลต์ |
6 | 20 |
12 |
24 |
48 |
| ความต้านทาน ±10% |
โอห์ม |
1.0 | 13.5 |
7.5 |
3.6 |
16.6 |
| ความเร็วรอบขณะเดินเครื่อง ±10% |
รอบต่อนาที |
7500 | 6000 |
4500 |
12700 |
13000 |
| ไม่มีโหลดปัจจุบัน ≤125% |
มิลลิแอมป์ |
50 | 20 |
15 |
60 |
50 |
| ความเร็วคงที่ |
รอบต่อนาที/วี |
1250 | 300 |
375 |
529 |
271 |
| แรงบิดคงที่ |
มิลลินิวตันเมตร/เอ |
7.58 | 31.42 |
25.24 |
17.89 |
34.67 |
| แผงลอยปัจจุบัน |
มิลลิแอมป์ |
6000 | 1481 |
1600 |
6667 |
2892 |
| แรงบิดคอก |
มม |
45.5 | 46.54 |
40.4 |
119.28 |
100.24 |
| สูงสุด ประสิทธิภาพ |
% | 83 | 78 |
82 |
82 |
75 |
| ตัวเหนี่ยวนำ mH |
mH |
0.05 | 1.06 |
0.58 |
0.23 |
1.046 |
| ค่าคงที่เวลาเครื่องกล |
นางสาว |
5.39 | 5.09 |
4.45 |
4.45 |
5.42 |
| ความเฉื่อยของโรเตอร์ |
ก.ซม.² |
3.11 | 3.76 |
3.8 |
3.98 |
3.98 |
| ที่แม็กซ์ เอาท์พุต |
|
|
||||
| ปัจจุบัน |
มิลลิแอมป์ |
770 | 340 |
480 |
815 |
378 |
| แรงบิด |
มม |
5.8 | 10.68 |
12.1 |
14.58 |
13.1 |
| ความเร็ว |
รอบต่อนาที |
6538 | 4484 |
3150 |
11147 |
10962 |
| เอาท์พุต |
W |
4 | 5 |
4 |
17 |
15 |
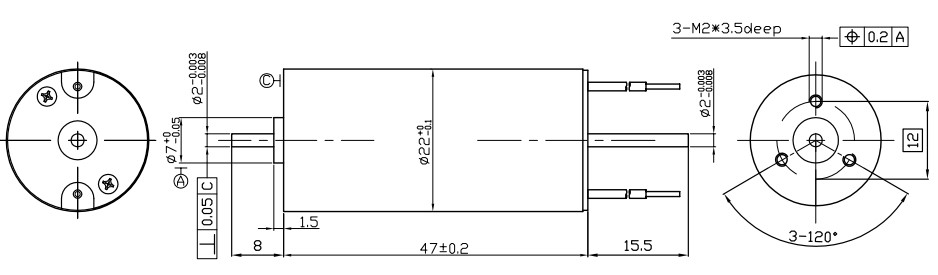
การวัด
ลักษณะเฉพาะของมอเตอร์
● ช่วงอุณหภูมิแวดล้อม -40~+100℃
● สูงสุด อุณหภูมิไขลานที่อนุญาต 155 ℃
● จำนวนเซ็กเมนต์สับเปลี่ยน 9
● น้ำหนัก 60 ก
● แปรงคาร์บอน
● สูงสุด ความลึกของการติดตั้งสกรู 3 มม
● สูงสุด อุณหภูมิไขลานที่อนุญาต 155 ℃
● จำนวนเซ็กเมนต์สับเปลี่ยน 9
● น้ำหนัก 60 ก
● แปรงคาร์บอน
● สูงสุด ความลึกของการติดตั้งสกรู 3 มม
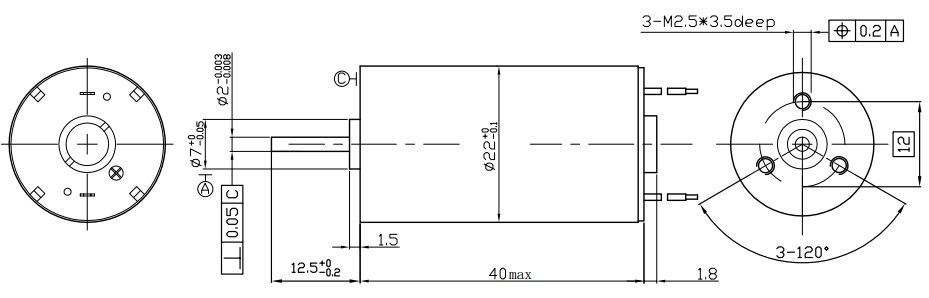
พารามิเตอร์เทคนิค 22SYK35.H.T
พารามิเตอร์มอเตอร์
| กำลังไฟที่กำหนด |
W | 18 | 5 | 15 |
| แรงดันไฟฟ้าที่ได้รับการจัดอันดับ |
โวลต์ |
24 | 27 | 28 |
| ความต้านทาน ±10% |
โอห์ม |
3.4 | 16 | 5.3 |
| ความเร็วรอบขณะเดินเครื่อง ±10% |
รอบต่อนาที |
12700 | 8500 | 13000 |
| ไม่มีโหลดปัจจุบัน ≤125% |
มิลลิแอมป์ |
50 | 20 | 60 |
| ความเร็วคงที่ |
รอบต่อนาที/วี |
529 | 315 | 464 |
| แรงบิดคงที่ |
มิลลินิวตันเมตร/เอ |
17.93 | 29.99 | 20.34 |
| แผงลอยปัจจุบัน |
มิลลิแอมป์ |
7059 | 1688 | 5283 |
| แรงบิดคอก |
มม |
126.54 | 50.61 | 107.48 |
| สูงสุด ประสิทธิภาพ |
% |
84 | 79 | 80 |
| ตัวเหนี่ยวนำ mH |
mH |
0.25 | 1.085 | 0.33 |
| ค่าคงที่เวลาเครื่องกล |
นางสาว |
4.19 | 7.83 | 2.46 |
| ความเฉื่อยของโรเตอร์ |
ก.ซม.² |
3.98 | 4.44 | 1.94 |
| ที่แม็กซ์ เอาท์พุต |
||||
| ปัจจุบัน |
มิลลิแอมป์ |
850 | 220 | 635 |
| แรงบิด |
มม |
15.24 | 6.6 | 12.92 |
| ความเร็ว |
รอบต่อนาที |
11171 | 7392 | 11094 |
| เอาท์พุต |
W | 18 | 5 | 15 |
การวัด

ลักษณะเฉพาะของมอเตอร์
● ช่วงอุณหภูมิแวดล้อม -40~+100℃
● สูงสุด อุณหภูมิไขลานที่อนุญาต 155 ℃
● จำนวนเซ็กเมนต์สับเปลี่ยน 9
● น้ำหนัก 62 กรัม
● แปรงคาร์บอน
● สูงสุด ความลึกของการติดตั้งสกรู 3.5 มม
● สูงสุด อุณหภูมิไขลานที่อนุญาต 155 ℃
● จำนวนเซ็กเมนต์สับเปลี่ยน 9
● น้ำหนัก 62 กรัม
● แปรงคาร์บอน
● สูงสุด ความลึกของการติดตั้งสกรู 3.5 มม
พารามิเตอร์เทคนิค 22SYK40.H.T
พารามิเตอร์มอเตอร์
| กำลังไฟที่กำหนด |
W | 40.0 | 14.0 | 15.0 |
| แรงดันไฟฟ้าที่ได้รับการจัดอันดับ |
โวลต์ |
28 |
36 |
48 |
| ความต้านทาน ±10% |
โอห์ม |
2.9 |
10.00 |
16.00 |
| ความเร็วรอบขณะเดินเครื่อง ±10% |
รอบต่อนาที |
12000 |
8000 |
9000 |
| ไม่มีโหลดปัจจุบัน ≤125% |
มิลลิแอมป์ |
60 |
30 |
20 |
| ความเร็วคงที่ |
รอบต่อนาที/วี |
429 |
222 |
188 |
| แรงบิดคงที่ |
มิลลินิวตันเมตร/เอ |
22.15 |
42.64 |
50.62 |
| แผงลอยปัจจุบัน |
มิลลิแอมป์ |
9655 |
3600 |
3000 |
| แรงบิดคอก |
มม |
213.91 |
153.49 |
151.85 |
| สูงสุด ประสิทธิภาพ |
% |
85 |
83 |
84 |
| ตัวเหนี่ยวนำ mH |
mH |
0.351 |
1.171 |
1.851 |
| ค่าคงที่เวลาเครื่องกล |
นางสาว |
4.01 |
3.89 |
3.80 |
| ความเฉื่อยของโรเตอร์ |
ก.ซม.² |
6.8 |
7.10 |
6.10 |
| ที่แม็กซ์ เอาท์พุต |
|
|||
| ปัจจุบัน |
มิลลิแอมป์ |
1850 |
450 |
350 |
| แรงบิด |
มม |
40.99 |
19.19 |
17.72 |
| ความเร็ว |
รอบต่อนาที |
9410 |
7000 |
7950 |
| เอาท์พุต |
W |
40 |
14 |
15 |
การวัด
ลักษณะเฉพาะของมอเตอร์
● ช่วงอุณหภูมิแวดล้อม -40~+100℃
● สูงสุด อุณหภูมิไขลานที่อนุญาต 155 ℃
● จำนวนเซ็กเมนต์สับเปลี่ยน 9
● น้ำหนัก 72 กรัม
● แปรงคาร์บอน
● สูงสุด ความลึกของการติดตั้งสกรู 3.5 มม
● สูงสุด อุณหภูมิไขลานที่อนุญาต 155 ℃
● จำนวนเซ็กเมนต์สับเปลี่ยน 9
● น้ำหนัก 72 กรัม
● แปรงคาร์บอน
● สูงสุด ความลึกของการติดตั้งสกรู 3.5 มม
พารามิเตอร์เทคนิค 22SYK47.G.T
พารามิเตอร์มอเตอร์
| กำลังไฟที่กำหนด |
W | 30 | 33 |
30 |
| แรงดันไฟฟ้าที่ได้รับการจัดอันดับ |
โวลต์ |
24 | 36 |
48 |
| ความต้านทาน ±10% |
โอห์ม |
2.2 | 2.98 |
6 |
| ความเร็วรอบขณะเดินเครื่อง ±10% |
รอบต่อนาที |
10000 | 12500 |
12700 |
| ไม่มีโหลดปัจจุบัน ≤125% |
มิลลิแอมป์ |
40 | 40 | 60 |
| ความเร็วสูงสุด |
รอบต่อนาที/วี |
417 | 347 | 265 |
| แรงบิดสูงสุด |
มิลลินิวตันเมตร/เอ |
22.85 | 27.42 | 35.84 |
| แผงลอยปัจจุบัน |
มิลลิแอมป์ |
10909 | 12081 | 8000 |
| แรงบิดคอก |
มม |
249.23 | 331.31 | 286.71 |
| สูงสุด ประสิทธิภาพ |
% |
88 | 89 |
83 |
| ตัวเหนี่ยวนำ mH |
mH |
0.304 | 0.412 |
0.75 |
| ค่าคงที่เวลาเครื่องกล |
นางสาว |
3.8 | 3.7 | 3.62 |
| ความเฉื่อยของโรเตอร์ |
ก.ซม.² |
9.02 | 9.33 | 7.79 |
| ที่แม็กซ์ เอาท์พุต |
|
|||
| ปัจจุบัน |
มิลลิแอมป์ |
1500 | 1020 | 690 |
| แรงบิด |
มม |
34.27 | 27.97 | 24.73 |
| ความเร็ว |
รอบต่อนาที |
8366 |
11216 |
11605 |
| เอาท์พุต |
W |
30.0 | 33 | 30 |
การวัด
ลักษณะเฉพาะของมอเตอร์
● ช่วงอุณหภูมิแวดล้อม -40~+100℃
● สูงสุด อุณหภูมิไขลานที่อนุญาต 155 ℃
● จำนวนเซ็กเมนต์สับเปลี่ยน 9
● น้ำหนัก 88 กรัม
● แปรงคาร์บอน
● สูงสุด ความลึกของการติดตั้งสกรู 3.5 มม
● สูงสุด อุณหภูมิไขลานที่อนุญาต 155 ℃
● จำนวนเซ็กเมนต์สับเปลี่ยน 9
● น้ำหนัก 88 กรัม
● แปรงคาร์บอน
● สูงสุด ความลึกของการติดตั้งสกรู 3.5 มม
แท็กยอดนิยม: มอเตอร์กระแสตรงแปรงคาร์บอน 22 มม. จีน ผู้ผลิต ผู้จำหน่าย โรงงาน ทำในประเทศจีน กำหนดเอง ราคา
หมวดหมู่ที่เกี่ยวข้อง
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง